

LORIS: Ekstrem Arazi Keşif Robotu!
Paul Nadan, Spencer Backus ve Aaron M. Johnson, IEEE Uluslararası Robotik ve Otomasyon Konferansı ile tanıtımını gerçekleştirdi. İşte detaylar!
Tırmanan robotlar, dik arazi özellikleri nedeniyle geleneksel gezgin robotların erişemediği bilimsel açıdan değerli alanları araştırabilir. Mikrospin tutucularla donatılmış robotlar özellikle yükselen kayalık uçurum yüzlerine çok uygun olduğu aktarıldı. Ancak mevcut tasarımların çoğu ya büyük ve yavaştır ya da duvarlar gibi nispeten düz yüzeylerle sınırlıdır. Bu boşluğu tutucu tasarımı ve kuvvet kontrolündeki yeniliklerle kapatmak için yeni bir serbest tırmanan robot ile doldurmayı planladıklarını aktardılar.
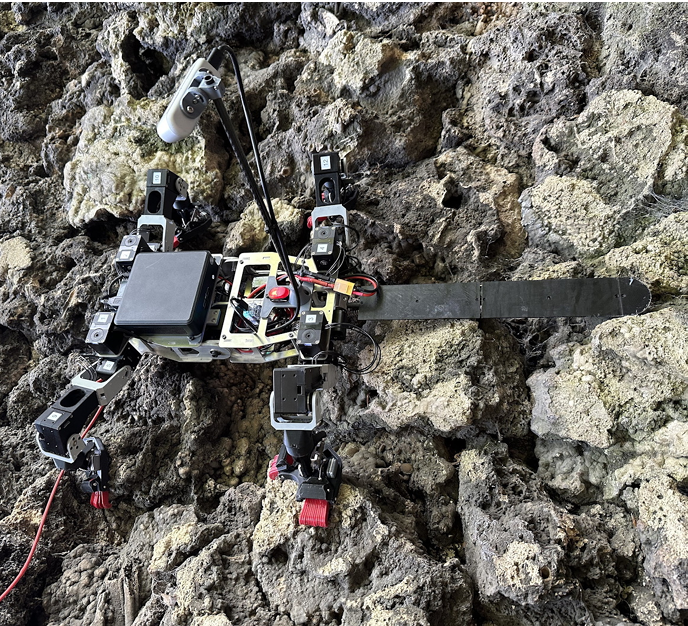
Robot için “Tamamen pasif tutucular ve bilek eklemleri, kütleyi ve karmaşıklığı azaltırken güvenli kavramaya olanak tanır. Beklenmeyen ayrılma riskini en aza indirmek için kuvvetler, optimizasyona dayalı bir kontrol stratejisi kullanılarak robotun tutucuları arasında dağıtılır. Robot prototipi, tam Dünya yerçekiminde hem düz cüruf blok duvarlarda hem de düzgün olmayan kaya yüzeylerinde dikey tırmanmayı gösterdi. ” dedi
LORIS: Ekstrem Arazi Keşif Robotu!
Şirketin yayınladığı kitapçığa göre “Tırmanan robotlar, güneş sistemi boyunca bilimsel açıdan ilginç dik kaya yüzeylerini, mağaraları ve mikrogravite ortamlarını keşfetme potansiyeline sahiptir. Tekerlekli gezginler genellikle sığ eğimlerle sınırlıyken, mikrospin kavrayıcılarla donatılmış robotlar, yüzeydeki küçük kaba noktalara takılan keskin kancalardan oluşan diziler kullanarak dik kaya yüzeylerini tırmanabilirler. İlk mikrospin kavrayıcılar tamamen pasifti ve gerekli tutma kuvvetini sağlamak için robotun ağırlığına güveniyordu ve bu kavrayıcılara sahip robotlar, binaların duvarları gibi nispeten düz yüzeylerde hareket etmek üzere tasarlanmıştı.” diyor.
Ve devamında “Bununla birlikte, mikrospin kavrayıcı, mikrospinler arasında büyük, karşıt etkileşim kuvvetleri üretmek için bir aktüatör kullanıyordu, bu da LEMUR serisi robotların daha büyük ağırlıklarını desteklemesine ve yapısal olarak düzensiz doğal arazi özelliklerini aşmasına olanak tanıyordu. Diğer araştırmacılar benzer bir yaklaşımı izleyerek aynı prensibe dayanan aktif kavrayıcılar yarattılar, ancak bu kavrayıcılar daha hızlı etkileşim sağlayacak şekilde tasarlanmıştı ve boyutları ile kütlesi azaltılmıştı.
Bazı kavrayıcılar, sağlam bir kavrama sağlamak için çıkıntılı basamakları kapatırken düz bir yüzeyde daha az etkilidir. Her bir kavrayıcı yerine bir tırmanıcının bacakları arasında karşıt tutma kuvvetlerinin oluşturulduğu, yönlendirilmiş içe doğru kavrama (DIG) adı verilen bir böcekten esinlenmiş bir strateji sunarlar.” diye ekliyorlar.
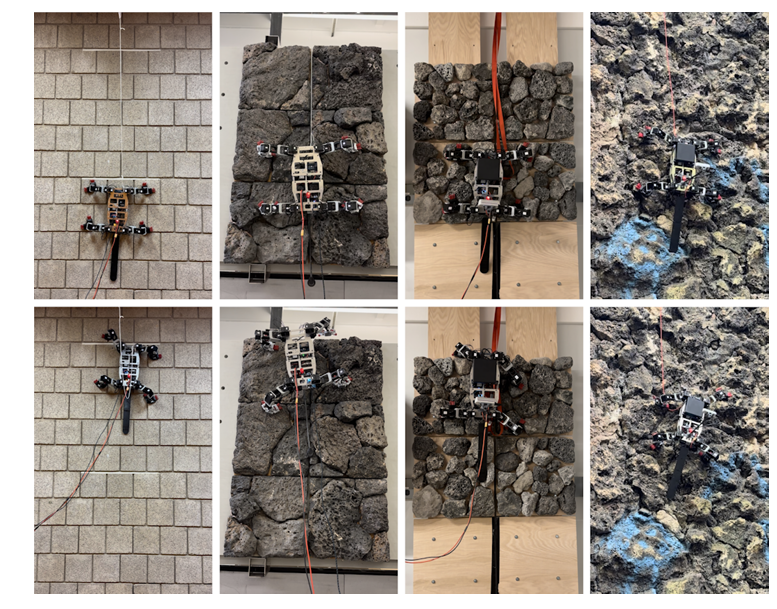
DIG kuvvetleri üreterek kavrama yapışkanlığını maksimize etmek için optimizasyon tabanlı bir kuvvet kontrol stratejisi sunduklarını açıklayan ekip, düzgün olmayan cüruf ve köpüklü bazalt tırmanma duvarları, düz tuğla ve doğal kaya özellikleri üzerinde tırmanma deneyleri yaptıklarını açıkladı.
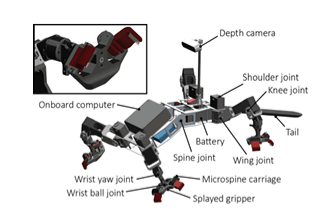
LORIS, mikrospinler kullanarak DIG kuvvetleri üreten ilk robot olmasının yanı sıra ve 3.2 kg ile tam Dünya yerçekiminde düzensiz dikey kaya yüzeylerinde serbest tırmanmayı gösteren boyutunda ilk robot olarak tanıtılıyor. LORIS, her uzvun omuz, “kanat” (abduksiyon / adduksiyon) ve diz için üç ekleme aktuatörüne sahip dört ayaklı bir robot demek tam olarak tasarımsal açıklaması olacaktır.
Tercih edilen tasarım, vücudun doğal konformasyonunu sağlayan, herhangi bir aktüasyon veya kontrol olmaksızın eğri bir zeminde doğal olarak uyum sağlayan “mekanik zeka” sağlayan, karşı koyucu serbestlik derecelerine sahiptir. Vücutta bir eğik omurga aktuatörü, daha büyük engellerin ve düzlemlerin geçilmesine yardımcı olurken, bir kuyruk aktuatörü, tırmanırken ön kavramaya yardımcı oluyor.
Kaynak için buraya tıklayınız.



